1. Sensor�ĸ���
Sensor�����������ڵ�ǰ�����ֻ��ϴ������ڣ�G-Sensor��LightsSensor��ProximitySensor��TemperatureSensor�ȣ�����ΪAndroidϵͳ��һ�������豸�����������û�������ƶ��豸��˵�DZز����ٵġ�Sensor��Ȼ��һ�������豸���������ֲ�ͬ�ڴ����������̣���������Щ����������豸����ΪSensor����������Ӵ�����Ӳ�����豸�ģ�������������豸�Ǵ��û����豸�ģ����磺�¶ȴ��������ڸ�֪�¶ȵı仯�����������������ϱ����豸����������Ӳ���Ĺ�����������������û������Ƶģ����Զ�ӦSensor�������乤����ʽ��˫��ģ���������Ӳ���Ŀ�������Ӳ���ϱ�������������Ҳ������Sensor�Ŀ�ܲ�ͬ�봥�����ȳ���������ϵͳ��
���½���Ҫ�о���Sensor��ܴ�����SensorHAL��ʵ��ϸ�ڣ�һ�л��Ǵ�Sensor��ܿ�ʼ���������ع���Led HAL��ʵ�ֿ�ܡ�
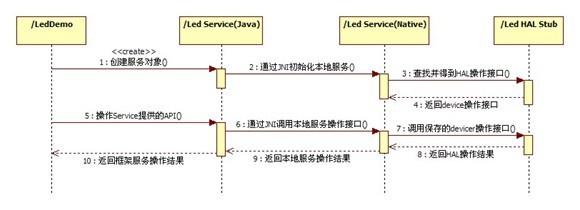
Led HAL�������Լ�ʵ�ֵģ���Ҫ��Ϊ�IJ��֣�
Led App��Led��Ӧ�ó���
Led Service��ܣ�LedӦ�õ�API�ṩ��
LedService���أ�LedService����ı���ʵ�֣��ϲ���ײ��ͨ��ת���ӿ�
Led HAL Stub��HAL����룬����Ӳ�����������ӿ�
�����ԣ�����д��Led HAL�����ǵ��͵Ŀ������������������Led�Ƶ����������ļܹ���������Sensor�ܹ������������¼��㣺
l Led�ǵ����Ŀ���������Sensor�ǿ�������������
Sensor������������ʵʱ�ģ������в������ʣ��������ݲ��������ģ������ڶ�ȡӲ���豸�����ϣ�ֻ�����ݵõ��ŷ��ء�
l Sensor���ṩ�����д�������ͨ�ÿ�ܣ��������ijһ�ض�Ӳ���ļܹ�
Sensor�����������ͣ����ϲ�͵ײ㶼�ж�Sensor�������͵����Σ�����ͨ�����д�������
l Sensor�ķ�������Ӧ�ó��������ģ�Ӧ���ǰ���ϵͳ������
�κ�һ��Ӧ�ó����ﶼ����ʹ��Sensor�����������Sensor����Ӧ�ð���ϵͳ������
2. Sensor�Ŀ�ܷ���
�����DZ�ϵ�е�һ�������ľ����豸�Ŀ�ܣ���Android SensorService��ע��������ʼ����Ӧ�ó�����SensorManagerע�ᴫ��������������ϸ������Ӧ�ò㵽Java��ܲ��ٵ����ش��룬�����HAL��ȫ�����̡�
1.1 Sensor���������
��ǰ��Android���������½ڿ�֪��Zygote�������������е�ÿһ��Java������SystemServer���������������������е�Android����
[cpp] view plaincopyprint?
������1. public static void main(String[] args) {
������ 2.������
������ 3.��������System.loadLibrary("android_servers");
������ 4.��������init1(args);
������ 5. }
��SystemServer��main������֪���������libandroid_servers.so�Ŀ⣬���ҵ�����init1()������
����ͨ��������������ҵ��ÿ�ı���Ŀ¼��
[plain] view plaincopyprint?
������1. find ./frameworks/base �Cname Android.mk �Cexec grep �Cl libandroid_servers{}\;
ͨ����ӡ����Ϣ֪�������Ӧ��Դ��Ŀ¼�ڣ�frameworks/base/services/jni/�£���ʵAndroid��ܲ�Ĵ�����ص����JavaĿ¼�´�ŵ��Ƕ�Ӧ��Java��ܴ��룬��Ӧ��jniĿ¼���Ƕ�Ӧ�ı��ش��롣
�����Ŀ¼���еĴ�����Ҫ�ľ��ǣ�com_android_server_SystemServer.cpp��
[cpp] view plaincopyprint?
������1. namespace android {
������ 2.
������ 3. extern "C" int system_init();
������ 4. static void android_server_SystemServer_init1(JNIEnv*env, jobject clazz)
������ 5. {
������ 6. system_init();
������ 7. }
������ 8. /*
������ 9. * JNIregistration.
������ 10. */
������ 11. static JNINativeMethod gMethods[] = {
������ 12. /* name,signature, funcPtr */
������ 13. {"init1", "([Ljava/lang/String;)V", (void*) android_server_SystemServer_init1},
������ 14. };
������ 15.
������ 16. int register_android_server_SystemServer(JNIEnv* env)
������ 17. {
������ 18. returnjniRegisterNativeMethods(env, "com/android/server/SystemServer",
������ 19. gMethods, NELEM(gMethods));
������ 20. }
������ 21.
������ 22. }; // namespace android
���벻�Ǻܶ࣬Ҳ�ȽϺö�������jniRegisterNativeMethods����ע��SystemServer��Java����Ҳ���ط���ӳ���ϵ��jniRegisterNativeMethods��һ�����ط�����ע��Helper������
SystemServer.java�ڼ�����libandroid_servers.so��֮������init1()��ͨ����������е�ӳ���ϵ��֪���������˱��ص�android_server_SystemServer_init1�������÷���ֱ�ӵ���system_init()����ʵ����frameworks/base/cmds/system_server/library/system_init.cpp��ʵ�֣�
[cpp] view plaincopyprint?
������1. extern "C" status_t system_init()
������ 2. {
������ 3. LOGI("Entered system_init()");
������ 4. sp<ProcessState> proc(ProcessState::self());
������ 5. sp<IServiceManager> sm = defaultServiceManager();
������ 6. LOGI("ServiceManager: %p\n", sm.get());
������ 7. sp<GrimReaper> grim = new GrimReaper();
������ 8. sm->asBinder()->linkToDeath(grim, grim.get(), 0);
������ 9.
������ 10. charpropBuf[PROPERTY_VALUE_MAX];
������ 11. property_get("system_init.startsurfaceflinger", propBuf,"1");
������ 12. if(strcmp(propBuf, "1") == 0) {
������ 13. // Startthe SurfaceFlinger
������ 14. SurfaceFlinger::instantiate();
������ 15. }
������ 16.
������ 17. property_get("system_init.startsensorservice", propBuf,"1");
������ 18. if(strcmp(propBuf, "1") == 0) {
������ 19. // Startthe sensor service
������ 20. SensorService::instantiate();
������ 21. }
������ 22. LOGI("Systemserver: starting Android runtime.\n");
������ 23. AndroidRuntime* runtime = AndroidRuntime::getRuntime();
������ 24.
������ 25. LOGI("System server: starting Android services.\n");
������ 26. JNIEnv* env =runtime->getJNIEnv();
������ 27. if (env ==NULL) {
������ 28. returnUNKNOWN_ERROR;
������ 29. }
������ 30.
������ 31. jclass clazz= env->FindClass("com/android/server/SystemServer");
������ 32. if (clazz ==NULL) {
������ 33. returnUNKNOWN_ERROR;
������ 34. }
������ 35.
������ 36. jmethodIDmethodId = env->GetStaticMethodID(clazz, "init2","()V");
������ 37. if (methodId== NULL) {
������ 38. returnUNKNOWN_ERROR;
������ 39. }
������ 40. env->CallStaticVoidMethod(clazz, methodId);
������ 41.
������ 42. LOGI("System server: entering thread pool.\n");
������ 43. ProcessState::self()->startThreadPool();
������ 44. IPCThreadState::self()->joinThreadPool();
������ 45. LOGI("System server: exiting thread pool.\n");
������ 46. }
����˽�Binder���ƵĻ���Ӧ��֪����sp proc(ProcessState::self())��Binder�������ᴴ��һ��ProcessState����ά�ֵ�ǰ���̵�Binderͨ�ŵķ������ˡ�
���ϵͳ������������system_init.startsensorservice ����Ϊ1����ͨ��SensorService::instantiate()����Sensor����
���ڳ�ѧ��ͷ�۵ľ��������������е����أ���д�Ĵ����ˣ�SensorService::instantiate()���õ����丸��ķ��������ǿ���ͨ������Ķ�������̳й�ϵ��Ȼ��˳�ż̳й�ϵ�������ҷ�����ʵ�֣����������������ﶼ�з�����ʵ�֣���ô��������ƥ�䣬����������ƥ�䣬��ô������ν����д�����õ�������ķ�����SensorService�Ķ������£�
@frameworks/base/services/sensorservice/SensroService.h
[cpp] view plaincopyprint?
������1. class SensorService :
������ 2. publicBinderService,
������ 3. publicBnSensorServer,
������ 4. protectedThread
������ 5. {
ͨ��SensorService�Ķ����֪���ڵ�ǰ����û��instantiate������������˵������õ��Ǹ���ķ�������̳���BinderService��BnSensorServer��Thread�ࣨ�ѵ�SensorService��һ���̣߳�������˳�ż̳й�ϵ�ң���BinderService������ҵ�instantiate������������
@frameworks/base/include/binder/BinderService.h
[cpp] view plaincopyprint?
������1. template
������ 2.
������ 3. class BinderService
������ 4. {
������ 5. public:
������ 6. static status_t publish() {
������ 7. sp sm(defaultServiceManager());
������ 8. returnsm->addService(String16(SERVICE::getServiceName()), new SERVICE());
������ 9. }
������ 10.
������ 11. static void publishAndJoinThreadPool() {
������ 12. sp proc(ProcessState::self());
������ 13. sp sm(defaultServiceManager());
������ 14. sm->addService(String16(SERVICE::getServiceName()), new SERVICE());
������ 15. ProcessState::self()->startThreadPool();
������ 16. IPCThreadState::self()->joinThreadPool();
������ 17. }
������ 18.
������ 19. static void instantiate() { publish(); }
������ 20.
������ 21. static status_t shutdown() {
������ 22. return NO_ERROR;
������ 23. }
������ 24. };
ͨ��������������֪��instantiate����������SensorService��ͨ��addService���Լ��´�����SensorService�������ӵ�Android�����б����ˡ�
Ok������������SensorService������
@frameworks/base/services/sensorservice/SensorService.cpp
[cpp] view plaincopyprint?
������1. SensorService::SensorService()
������ 2. :mInitCheck(NO_INIT)
������ 3. {
������ 4. }
������ 5.
������ 6. void SensorService::onFirstRef()
������ 7. {
������ 8. LOGD("nuSensorService starting...");
������ 9. SensorDevice& dev(SensorDevice::getInstance());
������ 10. ��
SensorService�Ĺ��췽���Ƚϼ���ʼ���˳�Ա����mInitCheckΪNO_INIT��
Ҫע��췽�������onFirstRef����������Androidϵͳ�����ü���ϵͳ���һ����������RefBase���������һ��ǿ����ʱ�Զ������䷽�������Ե���һ��ʹ��SensorService������÷������Զ��ص���
���磺
[cpp] view plaincopyprint?
������1. sp< ISensorServer> sm(mSensorService);
ע���������ü���ϵͳ��������߲�̫�˽⣬��ο��˷�ƽ��ʦ�ģ��������⣺Androidϵͳ���� ��I�е����師���֡�
SensorService������������ͣ���ȴ��ϲ�Ӧ�õ�ʹ��SensorService������onFirstRef������







